MOTORES HIDRÁULICOS
Motores de engranajes
Los motores hidráulicos de engranajes externos, se componen de un par de engranajes endentados encerrados en una carcasa. Ambos engranajes tienen la misma forma de los dientes y son accionados por un fluido a presión. Un engranaje está conectado a un eje de salida; el otro queda libre. El fluido a presión entra en la carcasa en un punto donde los engranajes se encastran, obligando a los engranajes a girar, donde el fluido sigue el camino de menor resistencia alrededor de la periferia de la carcasa. El fluido sale a baja presión en el lado opuesto del motor.
Las tolerancias estrechas entre los engranajes y la carcasa ayudan a controlar la fuga del líquido y aumentar la eficiencia volumétrica. Placas de desgaste a los costados de los engranajes evitan el movimiento axial de los engranajes y ayudan a controlar las fugas.
Motores hidráulicos de engranajes internos
Los motores hidráulicos de engranajes internos se dividen en dos categorías. Un motor de accionamiento directo de tipo gerotor que consiste en un conjunto de engranajes interno-externo y un eje de salida. El engranaje interior tiene un diente menos que el exterior. La forma de los dientes es tal que todos los dientes del engranaje interior están en contacto con alguna parte del engranaje exterior en todo momento. Cuando el fluido a presión se introduce en el motor, ambos engranajes giran. La carcasa del motor tiene orificios de entrada y de salida en forma de riñón. Los centros de rotación de los dos engranajes están separados en una cantidad dada conocida como excentricidad. El centro del engranaje interno coincide con el centro del eje de salida.
En la Figura 2 (a), el fluido a presión entra en el motor a través del orificio de entrada. Debido a que el engranaje interior tiene un diente menos que el exterior, se forma un bolsillo entre los dientes internos 6 y 1, y el zócalo de salida A. La toma de entrada en forma de riñón está diseñada de manera que justo al momento en que el volumen del bolsillo alcanza su máximo, el flujo de fluido se corta, con las puntas de los dientes del engranaje interior 6 y 1 proporcionando el cierre, ver Figura 2 (b). |
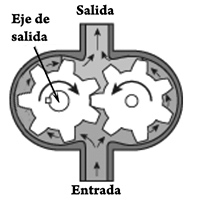
Figura. 1. Los motores de engranajes externos tienen un engranaje de accionamiento y un engranaje libre endentados dentro en una sola carcasa. El par de salida es una función de la presión sobre un diente debido ya que la presión sobre los otros dientes está en equilibrio hidráulico. |
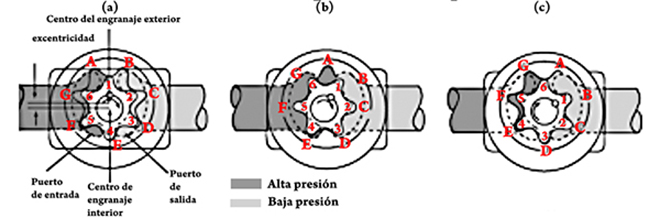
Figura. 2. El motor gerotor de impulsión directa tiene juegos de engranajes internos y externos. Ambos engranajes giran durante el funcionamiento
A medida que el par de engranajes interior y exterior continúan girando, ver Figura 2 (c), se forma un nuevo bolsillo interior entre los dientes 6 y 5, y el zócalo exterior G. Mientras tanto, el bolsillo formado entre los dientes internos 6 y 1 y el zócalo exterior A se ha movido alrededor en forma opuesta a la abertura de salida en forma de riñón, drenando de manera constante a medida que el volumen de la cavidad disminuye. El cambio gradual de volumen medido en los bolsillos durante la entrada y el drenaje de salida proporcionan un flujo de fluido suave y uniforme con un mínimo de variación de la presión (o rizado).
Debido al diente extra en el engranaje exterior, los dientes de engranaje interiores se mueven por delante del exterior en un diente por vuelta. En la Figura 2 (c), el diente interior 4 está asentado en el zócalo exterior E. En el siguiente ciclo, el diente interior 4 se asentará en el zócalo exterior F. Esto produce una velocidad diferencial relativamente baja entre los engranajes.
Figura. 3. El motor orbital sistema gerotor tiene un engranaje exterior estacionario y un engranaje interior giratorio. El rotor y el eje giran en sentido contrario a las agujas del reloj, pero el lugar del punto X es en sentido horario. El conmutador o placa de la válvula, mostrados en la figura en cada etapa de la rotación del motor, proporciona la presión y el paso al tanque del fluido presurizado
Un motor orbital de tipo gerotor, ver Figura 3, se compone de un conjunto de engranajes endentados, un acoplamiento, un eje de salida, y un conmutador o placa de la válvula. El engranaje exterior estacionario tiene un diente más que el engranaje interior giratorio. El conmutador gira a la misma velocidad que el engranaje interior y siempre proporciona fluido a presión y un pasaje al tanque en los espacios adecuados entre los dos engranajes. |
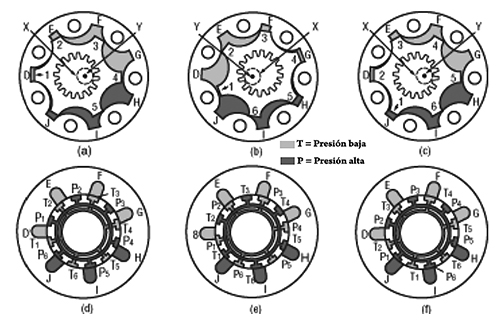 |
En funcionamiento, ver Figura 3 (a), el diente 1 de la rueda dentada interior está alineado exactamente en el zócalo D del engranaje exterior. El punto y es el centro de la rueda dentada estacionaria, y el punto x es el centro del rotor. Si no hubiera fluido, el rotor estaría libre para pivotar alrededor del zócalo D en cualquier dirección. Se podría mover hacia el asiento de diente 2 en el zócalo E o en sentido contrario, hacia el asiento de diente 6 en el zócalo J.
Cuando el fluido a presión fluye dentro de la mitad inferior del volumen entre los engranajes interior y exterior, si se proporciona una vía de paso al tanque para el volumen de la mitad superior entre los engranajes interior y exterior, se induce un momento que hace girar al engranaje interior en sentido antihorario y comienza a asentar al diente 2 sobre el zócalo E. El diente 4, en el instante mostrado en la Figura 3 (a), proporciona un sello entre la presión y de retorno de fluido.
Sin embargo, a medida que la rotación continúa, el lugar geométrico del punto X está en sentido contrario a las agujas del reloj. A medida que cada diente sucesivo del rotor se asienta en su zócalo, ver figura 3 (b), el diente directamente opuesto en el rotor del diente asentado se convierte en el sello entre la presión y de retorno de fluido. El fluido a presión continúa forzando al rotor a que engrane en una dirección en sentido horario mientras, que el mismo gira en sentido opuesto. |


Figura : Motor hidráulico tipo gerotor |
Debido al zócalo adicional en el engranaje fijo, la próxima vez que el diente 1 se asiente, lo hará en el zócalo J. En ese punto, el eje ha girado 1/7 de una revolución, y el punto X se ha movido 6/7 de su giro completo. En la Figura 3 (c), el diente 2 se ha endentado con el zócalo D, y el punto X se ha vuelto de nuevo a alinear entre el zócalo D y el punto Y, lo que indica que el rotor ha hecho una revolución completa en el interior del engranaje exterior. El diente 1 se ha movido a través de un ángulo de 60° de su punto original en la Figura 3 (a); se necesitarían 42 (o 6 X 7) engranes de dientes o ciclos de fluido para que el eje complete una revolución.
El conmutador o placa de válvula, que se muestra en las figuras 3 (d), (e) y (f), contiene pasajes de presión y de tanque para cada diente del rotor. Los pasajes están espaciados de modo que no proporcionan presión o retorno de flujo al puerto correspondiente mientras los dientes se asientan en su zócalo. El resto del tiempo, los pasajes están bloqueados o están proporcionando fluido a presión o pasaje al tanque en la mitad apropiada del motor entre los engranajes.
|

