| brushless motor |
Motor Sin Escobillas (Brushless Motor): Definición, Partes, Aplicaciones y Tipos
Un motor sin escobillas (brushless motor, o BLDC por sus siglas en inglés) es un tipo de motor eléctrico que, a diferencia de los motores tradicionales de corriente continua (DC), no utiliza escobillas para conmutar la corriente en el rotor. En lugar de escobillas, los motores sin escobillas utilizan un sistema de conmutación electrónica para cambiar la dirección de la corriente, lo que mejora su eficiencia, reduce el mantenimiento y aumenta la durabilidad.
Definición y Funcionamiento del Motor Sin Escobillas
El motor sin escobillas es un motor de corriente continua que utiliza un sistema de control electrónico para conmutar la corriente de manera precisa en el estator, mientras que el rotor es alimentado por un campo magnético generado por un imán permanente. Esto elimina la necesidad de las escobillas, que en los motores convencionales causan fricción, desgaste y pérdida de energía.
El funcionamiento básico de un motor sin escobillas se basa en tres elementos principales: el estator, el rotor y el controlador. El estator, que contiene las bobinas, genera un campo magnético rotatorio cuando se aplica una corriente. El rotor, que contiene imanes permanentes, sigue el movimiento del campo magnético del estator. El controlador ajusta la corriente que pasa por las bobinas del estator para asegurar que el rotor siga la dirección y velocidad deseadas.

- Control Signals (Señales de Control)
- Decoder (Decodificador)
- Final Stage (Etapa Final)
- Hall-effect sensor supply (Suministro de sensor de efecto Hall)
- Power Supply (Fuente de Alimentación)
- Brushless DC motor (Motor de corriente continua sin escobillas)
Figura - Un sensor magnético como indicador de posición del rotor: bobinado del motor sin escobillas estacionario (1), rotor de motor con imán permanente (2), campo trifásico conmutado electrónicamente (3), tres sensores magnéticos (4) y la placa de circuito electrónico (5).

- Brushless DC motor (Motor de corriente continua sin escobillas)
- Control signals (Señales de control)
- Control unit (Unidad de control)
- Final stage (Etapa final)
- Power supply (Fuente de alimentación)
- Resolver (resolver, resolutor o codificador rotativo)
Figura - Un resolutor como indicador de posición del rotor: bobinado del motor estacionario (1), rotor de motor con imán permanente (2), campo trifásico conmutado electrónicamente (3), tres sensores magnéticos (4) y la placa de circuito electrónico (5).

Figura - Placa de controlador de motor de corriente continua sin escobillas
Partes Principales del Motor Sin Escobillas
Un motor sin escobillas se compone de varios componentes clave que trabajan en conjunto para lograr un rendimiento eficiente y preciso:
-
Estator: Es la parte estacionaria del motor y contiene las bobinas de alambre. El estator genera un campo magnético cuando se le aplica corriente. Dependiendo del tipo de motor, el estator puede ser de diseño síncrono o asíncrono.
-
Rotor: El rotor es la parte móvil del motor y está compuesto generalmente por imanes permanentes. El rotor sigue el campo magnético generado por el estator, lo que le permite girar.
-
Controlador de Conmutación Electrónica: Este componente es esencial en los motores sin escobillas, ya que se encarga de conmutar la corriente en las bobinas del estator. Utiliza un conjunto de transistores y sensores de posición para determinar la posición del rotor y conmutar la corriente de manera sincronizada.
-
Sensores de Posición: Los sensores de posición, como los sensores Hall, se utilizan para detectar la ubicación exacta del rotor y proporcionar información al controlador. Esta retroalimentación es necesaria para asegurar que la corriente se conmute correctamente y mantener el rotor en la posición adecuada.
-
Imán Permanente: El rotor de un motor sin escobillas contiene imanes permanentes que generan el campo magnético necesario para interactuar con las bobinas del estator y generar movimiento.
Tipos de Motores Sin Escobillas
Existen varios tipos de motores sin escobillas, que varían según su diseño y aplicación. Los más comunes son:
-
Motores BLDC de Rotor Externo: En estos motores, el rotor está en el exterior y gira alrededor del estator. Son comunes en aplicaciones de ventiladores, bombas y algunas aplicaciones automotrices.
-
Motores BLDC de Rotor Interno: En estos motores, el rotor está en el interior del estator y gira dentro de las bobinas. Son más comunes en aplicaciones que requieren alta eficiencia y precisión, como en drones, robots y herramientas eléctricas.
-
Motores Síncronos Sin Escobillas: Estos motores mantienen una velocidad constante que está sincronizada con la frecuencia de la corriente alterna que alimenta el motor. Se utilizan principalmente en aplicaciones que requieren una velocidad constante y controlada.
-
Motores de Inducción Sin Escobillas: Aunque no son tan comunes como los BLDC, algunos motores sin escobillas utilizan principios de inducción para generar movimiento. Estos son útiles en aplicaciones que requieren alta potencia y eficiencia.
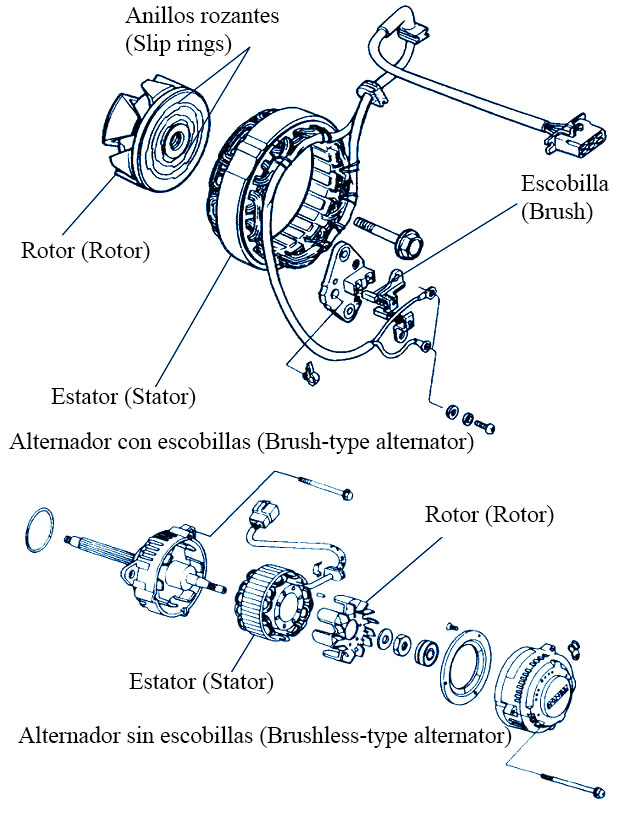
Fig. : Sistemas de bobina de campo excitado con escobillas y sin escobillas.
Anillos rozantes (Slip rings)
Rotor (Rotor)
Estator (Stator)
Escobilla (Brush)
Alternador con escobillas (Brush-type alternator)
Alternador sin escobillas (Brushless-type alternator)
Fig. : Sistemas de bobina de campo excitado con escobillas y sin escobillas
Aplicaciones de los Motores Sin Escobillas
Los motores sin escobillas son ampliamente utilizados en una variedad de aplicaciones industriales, comerciales y de consumo debido a sus ventajas sobre los motores tradicionales con escobillas. Algunas de sus aplicaciones más comunes incluyen:
-
Electrodomésticos: Los motores sin escobillas se utilizan en electrodomésticos como aspiradoras, licuadoras y ventiladores, donde se requiere una alta eficiencia y durabilidad sin la necesidad de mantenimiento constante.
-
Vehículos Eléctricos: En los vehículos eléctricos (EV) y los vehículos híbridos, los motores sin escobillas son una opción popular debido a su alta eficiencia, menor consumo de energía y vida útil más larga en comparación con los motores con escobillas.
-
Drones y Vehículos Autónomos: Los motores sin escobillas son ideales para drones y vehículos autónomos debido a su tamaño compacto, alta potencia y capacidad para proporcionar un control preciso del movimiento.
-
Sistemas de Energía Renovable: En los generadores eólicos y sistemas de seguimiento solar, los motores sin escobillas se utilizan para ajustar las palas del generador o la orientación de los paneles solares, maximizando la eficiencia energética.
-
Robótica y Automatización Industrial: Los motores sin escobillas son esenciales en aplicaciones robóticas y sistemas de automatización donde se requieren movimientos precisos y repetibles, como en brazos robóticos, impresoras 3D y maquinaria CNC.
Ventajas de los Motores Sin Escobillas
Los motores sin escobillas ofrecen una serie de ventajas significativas sobre los motores convencionales con escobillas:
-
Mayor Eficiencia: Los motores sin escobillas tienen una mayor eficiencia energética debido a la falta de fricción y desgaste que se produce en los motores con escobillas. Esto se traduce en menor consumo de energía y mayor rendimiento.
-
Mayor Durabilidad y Menos Mantenimiento: Al no tener escobillas que se desgasten con el tiempo, los motores sin escobillas requieren menos mantenimiento y tienen una vida útil más larga.
-
Menos Ruido y Vibración: Los motores sin escobillas producen menos ruido y vibración, lo que los hace ideales para aplicaciones en las que la operación silenciosa es crucial.
-
Control de Velocidad Preciso: Gracias al controlador electrónico y los sensores de posición, los motores sin escobillas pueden ofrecer un control de velocidad más preciso y dinámico.
Desventajas de los Motores Sin Escobillas
A pesar de sus muchas ventajas, los motores sin escobillas también tienen algunas desventajas:
-
Costo Más Alto: Los motores sin escobillas suelen ser más caros que los motores con escobillas debido a la complejidad de su diseño y la necesidad de un controlador de conmutación electrónica.
-
Requiere Controlador Electrónico: Los motores sin escobillas necesitan un controlador electrónico especializado para funcionar, lo que agrega complejidad y costo al sistema.
-
Sensibilidad a la Temperatura: Los motores sin escobillas pueden ser sensibles a las altas temperaturas, lo que puede afectar su rendimiento si no se gestionan adecuadamente las condiciones térmicas.
Comparación con Otros Tipos de Motores
Comparado con los motores con escobillas (DC), los motores sin escobillas ofrecen una mayor eficiencia y durabilidad debido a la eliminación de las escobillas, que son una fuente de fricción y desgaste en los motores tradicionales. Además, los motores sin escobillas tienen un control más preciso de la velocidad y el par motor, lo que los hace ideales para aplicaciones que requieren precisión.
En comparación con los motores de inducción (AC), los motores sin escobillas tienden a ser más compactos, eficientes y ligeros. Sin embargo, los motores de inducción pueden ser más fáciles de controlar en aplicaciones de mayor potencia.
Términos destacados :
- Aceleración (Acceleration)
- Ángulo de desalineación (Misalignment angle)
- Amortiguación (Damping)
- Arranque suave (Soft start)
- Atributos de control (Control attributes)
- Backlash (Backlash)
- Caja de reducción (Gearbox)
- Capacidad de torque (Torque capacity)
- Control de velocidad (Speed control)
- Control de posición (Position control)
- Controlador (Controller)
- Corriente continua (Direct current - DC)
- Corriente alterna (Alternating current - AC)
- Desempeño (Performance)
- Desviación de velocidad (Speed deviation)
- Eficiencia (Efficiency)
- Electromagnetismo (Electromagnetism)
- Escobillas (Brushes)
- Frecuencia (Frequency)
- Fuerza de torque (Torque force)
- Generador de corriente continua (DC generator)
- Habilidad de respuesta (Response capability)
- Motor sin escobillas (Brushless motor)
- Motor paso a paso (Step motor)
- Motor síncrono (Synchronous motor)
- Motor de inducción (Induction motor)
- Motor de corriente continua (DC motor)
- Motor de corriente alterna (AC motor)
- Par motor (Motor torque)
- Potenciómetro (Potentiometer)
- Presión (Pressure)
- Regulación de voltaje (Voltage regulation)
- Revoluciones por minuto (Revolutions per minute - RPM)
- Sistemas de retroalimentación (Feedback systems)
- Sistemas de control automático (Automatic control systems)
- Sistemas de precisión (Precision systems)
- Sistemas de accionamiento (Drive systems)
- Torque de salida (Output torque)
- Transductor (Transducer)
- Velocidad constante (Constant speed)
El motor sin escobillas es una opción superior para muchas aplicaciones que requieren alta eficiencia, control preciso y bajo mantenimiento. Su capacidad para operar de manera silenciosa, su larga vida útil y su eficiencia energética lo hacen ideal para aplicaciones en vehículos eléctricos, robótica, electrodomésticos y más. Aunque presenta algunas desventajas, como el costo y la necesidad de controladores electrónicos, los motores sin escobillas continúan ganando popularidad debido a sus numerosas ventajas sobre los motores tradicionales.
Alternadores :

Figura : Sistemas de Bobina de Campo Excitado Tipo con Escobillas y Tipo sin Escobillas
- Alternador tipo con escobillas ( Brush-Type Alternator )
- Alternador tipo sin escobillas ( Brushless-Type Alternator )
- Anillos rozantes ( Slip Rings )
- Escobilla ( Brush )
- Estator ( Stator )
- Estator (tipo con escobillas) ( Stator - Brush-Type Alternator )
- Estator (tipo sin escobillas) ( Stator - Brushless-Type Alternator )
- Rotor ( Rotor )
- Rotor (tipo con escobillas) ( Rotor - Brush-Type Alternator )
- Rotor (tipo sin escobillas) ( Rotor - Brushless-Type Alternator )
Diferencia entre Alternador con Escobillas y Alternador sin Escobillas
El diagrama muestra dos tipos de alternadores utilizados en sistemas de generación eléctrica en vehículos o maquinaria: alternador tipo con escobillas y alternador tipo sin escobillas.
Alternador tipo con escobillas (Brush-Type Alternator)
- Componentes principales: Rotor, estator, escobillas y anillos rozantes.
- Funcionamiento: La corriente de excitación pasa a través de las escobillas y anillos rozantes hacia el devanado del rotor.
- Características: Diseño sencillo, más económico, requiere mayor mantenimiento por desgaste de las escobillas, y puede generar interferencias eléctricas.
Alternador tipo sin escobillas (Brushless-Type Alternator)
- Componentes principales: Rotor con imanes permanentes o bobinas especiales, estator.
- Funcionamiento: No utiliza escobillas ni anillos rozantes; la excitación se realiza mediante campos magnéticos o generadores auxiliares internos.
- Características: Requiere menor mantenimiento, ofrece mayor durabilidad y fiabilidad, y tiene mejor desempeño en ambientes exigentes.
Resumen comparativo
| Característica |
Alternador con escobillas |
Alternador sin escobillas |
| Mantenimiento |
Alto (reemplazo de escobillas) |
Bajo |
| Durabilidad |
Menor |
Mayor |
| Coste inicial |
Más económico |
Más costoso |
| Eficiencia a largo plazo |
Menor |
Mayor |
| Propenso a interferencias |
Sí |
No |
|


