| English |
Español |
|---|---|
| inductometer ( electronics, computer science, nuclear energy ) | (inductómetro). Instrumento destinado a medir valores de la inductancia. |
| inductor ( electronics, computer science, nuclear energy ) | (inductancia, inductor). Elemento de circuito que se comporta fundamentalmente como una inductancia pura; el hecho de asignar en español la misma voz para la propiedad y para el elemento puede prestar a confusión, por lo que puede ser aconsejable usar más el término «inductor» que «inductancia». |
| inductor (choke) (Automotive) | Inductor (supresor). |
| inductor generator ( electronics, computer science, nuclear energy ) | (alternador de hierro giratorio). Alternador en el que las bobinas inductoras son fijas, así como los devanados del inducido, provocándose la variación del flujo que atraviesa a estos últimos por el movimiento de masas ferromagnéticas. |
| industrial air -conditioning (Heavy Equipment) | Aire acondicionado industrial |
| industrial cleaner (Heavy Equipment) | Limpiadores industriales |
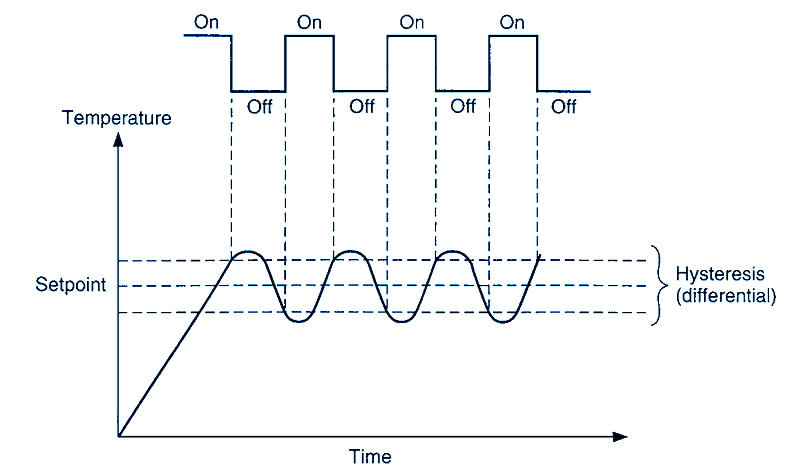
| industrial control ( electronics, computer science, nuclear energy ) | (control industrial). En términos generales, métodos y medios de gobernar el comportamiento de un dispositivo, aparato, equipo o sistema usado en la industria. Modos de control industrial Los controladores industriales modernos se emplean para producir una o varias acciones de control sobre un proceso. Entre los modos más comunes se encuentran el control todo-nada, el control proporcional, el control proporcional más integral, el control proporcional más derivativo, el control proporcional más integral más derivativo y otros sistemas especiales como el control proporcional de tiempo y de corriente. Control todo-nadaEl control todo-nada, también llamado on-off control, es uno de los métodos más simples de control automático. En este sistema, el elemento final de control sólo puede estar en dos estados: encendido o apagado, abierto o cerrado, conectado o desconectado. Un ejemplo típico es el control de temperatura mediante un calefactor. Cuando la temperatura del proceso cae por debajo del punto de ajuste, el calefactor se conecta. Cuando la temperatura supera cierto valor, el calefactor se desconecta. De esta forma, la temperatura oscila alrededor del valor deseado. Este tipo de control es sencillo y económico, pero no mantiene la variable exactamente en el punto de ajuste. Siempre aparece una oscilación entre un límite superior y un límite inferior. La diferencia entre esos dos límites se denomina diferencial o histéresis. Histéresis o diferencialLa histéresis es la separación entre el punto en que el controlador conecta la salida y el punto en que la desconecta. Su función es evitar que el dispositivo se active y desactive demasiado rápido ante pequeñas variaciones de la señal medida. Por ejemplo, si un controlador de temperatura encendiera y apagara el calefactor exactamente en el mismo valor, cualquier pequeña fluctuación produciría conmutaciones rápidas. Esto provocaría desgaste en contactos, relés, válvulas o elementos de potencia. Por eso se establece una banda de operación: el sistema se enciende en un valor y se apaga en otro. Control proporcionalEl control proporcional mejora el comportamiento del control todo-nada. En lugar de entregar sólo una salida máxima o mínima, el controlador modifica su salida en proporción al error existente entre la variable medida y el punto de ajuste.
El error es la diferencia entre el valor deseado y el valor real del proceso. Si el error es grande, la corrección también será grande. Si el error es pequeño, la salida del controlador será menor. De esta manera, el sistema responde de forma más suave y continua. En un sistema de calefacción, por ejemplo, el controlador proporcional puede aplicar mucha potencia cuando la temperatura está lejos del punto de ajuste, y reducir progresivamente esa potencia a medida que la temperatura se aproxima al valor deseado. Banda proporcionalLa banda proporcional es el intervalo de valores de la variable controlada dentro del cual la salida del controlador cambia de 0 % a 100 %. Si la banda proporcional es amplia, se requiere una gran variación de temperatura para producir un cambio importante en la salida. Si la banda proporcional es estrecha, una pequeña variación de temperatura produce una gran modificación en la salida. Una banda proporcional muy estrecha puede causar oscilaciones, porque el controlador reacciona con demasiada fuerza. Una banda proporcional muy amplia puede hacer que el sistema responda lentamente y que no alcance exactamente el valor deseado. Ganancia proporcionalLa ganancia proporcional indica cuánto cambia la salida del controlador ante una variación del error. Es inversamente proporcional a la banda proporcional. Una ganancia alta equivale a una banda proporcional estrecha; una ganancia baja equivale a una banda proporcional ancha. En términos prácticos, aumentar la ganancia hace que el controlador sea más sensible. Sin embargo, si se aumenta demasiado, el proceso puede volverse inestable. Por eso el ajuste de la ganancia es una tarea importante en la puesta en marcha de sistemas de control. Offset o desviación permanenteUna característica del control proporcional puro es que puede producirse un offset, es decir, una diferencia permanente entre el valor real del proceso y el punto de ajuste. Esto ocurre porque, para mantener una salida determinada, el controlador necesita que exista un error. Por ejemplo, si el sistema necesita cierta potencia de calefacción para mantener la temperatura, el controlador proporcional puede requerir una pequeña diferencia entre la temperatura real y el punto de ajuste para entregar esa potencia. Esa diferencia es el offset. Reset manual y automáticoEl reset es una acción destinada a eliminar el offset. Puede realizarse manualmente o automáticamente. En el reset manual, el operador modifica el ajuste del controlador para compensar la desviación permanente. Este método puede funcionar en procesos simples, pero requiere intervención humana. El reset automático se logra mediante una acción integral. Esta acción observa el error a lo largo del tiempo y modifica gradualmente la salida del controlador hasta eliminar la desviación permanente. Si el proceso queda por debajo del punto de ajuste, la acción integral aumenta la salida. Si queda por encima, la reduce. Control proporcional más integralEl control proporcional más integral, conocido como control PI, combina la acción proporcional con la acción integral. La parte proporcional responde inmediatamente al error actual. La parte integral responde al error acumulado en el tiempo. La ventaja principal del control PI es que reduce o elimina el offset característico del control proporcional puro. Por esta razón, es muy utilizado en sistemas de temperatura, presión, nivel y caudal. Sin embargo, si la acción integral es demasiado intensa, el sistema puede oscilar. Esto se debe a que el integrador continúa acumulando corrección mientras existe error, y puede producir una respuesta excesiva. Por eso se debe ajustar correctamente la constante de tiempo integral. Constante de tiempo integralLa constante de tiempo integral indica la rapidez con que actúa la acción integral. Se puede expresar como el tiempo necesario para que la parte integral iguale a la acción proporcional, cuando existe una desviación constante. También puede expresarse en repeticiones por minuto. Cuanto mayor sea el número de repeticiones por minuto, más rápida será la acción integral. Un ajuste demasiado rápido puede generar sobreoscilaciones; un ajuste demasiado lento puede hacer que el sistema tarde mucho en corregir el offset. Control derivativoLa acción derivativa responde a la velocidad de cambio del error. No actúa principalmente sobre el valor actual del error, sino sobre la rapidez con que ese error está aumentando o disminuyendo. Si la temperatura comienza a subir rápidamente hacia el punto de ajuste, la acción derivativa anticipa que puede producirse una sobrepasada y reduce la salida antes de que el error sea demasiado grande. Por eso se dice que la acción derivativa tiene un efecto anticipativo. La acción derivativa es útil para mejorar la estabilidad y reducir sobreimpulsos. Sin embargo, puede amplificar ruidos o pequeñas variaciones rápidas de la señal medida, por lo que debe aplicarse con cuidado. Control proporcional más derivativoEl control proporcional más derivativo, o control PD, combina la respuesta proporcional con una acción anticipativa. La parte proporcional corrige según el error, mientras que la parte derivativa corrige según la velocidad de cambio del error. Este tipo de control puede mejorar la respuesta dinámica del sistema, especialmente en procesos donde se desea reducir el sobrepaso y lograr una estabilización más rápida. No obstante, al no tener acción integral, puede seguir existiendo offset. Control proporcional, integral y derivativoEl control PID combina las tres acciones: proporcional, integral y derivativa. Es uno de los modos de control más utilizados en la industria porque reúne tres funciones complementarias. La acción proporcional proporciona una corrección inmediata; la acción integral elimina el error permanente; y la acción derivativa anticipa cambios rápidos, mejorando la estabilidad. Un controlador PID correctamente ajustado puede ofrecer buena rapidez de respuesta, bajo sobreimpulso y error final prácticamente nulo. Control proporcional de tiempoEl control proporcional de tiempo se utiliza cuando el elemento final de control sólo puede estar encendido o apagado, pero se desea obtener un efecto proporcional. En este caso, el controlador varía el porcentaje de tiempo durante el cual la salida permanece conectada dentro de un ciclo fijo. Por ejemplo, si el ciclo es de 12 segundos y la salida debe ser del 75 %, el controlador mantiene el calefactor encendido durante 9 segundos y apagado durante 3 segundos. Así, aunque la salida física sea todo-nada, el efecto promedio sobre el proceso es proporcional. Control proporcional de corrienteEn el control proporcional de corriente, la salida del controlador se entrega como una señal analógica, generalmente de 4 a 20 mA. Esta señal puede accionar válvulas, variadores, posicionadores o dispositivos electrónicos de potencia. Una señal de 4 mA suele representar el valor mínimo de salida y una señal de 20 mA el valor máximo. Los valores intermedios permiten controlar gradualmente la potencia, el caudal, la presión u otra variable del proceso. Control calor-fríoEl control calor-frío se aplica en procesos donde se necesita tanto calentar como enfriar. En estos sistemas puede haber una salida para calefacción y otra para refrigeración. Cuando la variable medida está por debajo del punto de ajuste, actúa la salida de calor. Cuando está por encima, actúa la salida de frío. En muchos casos se establece una zona muerta o separación entre ambas acciones para evitar que calefacción y refrigeración funcionen simultáneamente. Importancia de los modos de controlLa selección del modo de control depende del tipo de proceso, de la precisión requerida, del tiempo de respuesta, de la estabilidad necesaria y del tipo de elemento final de control. Un sistema simple puede funcionar correctamente con control todo-nada, mientras que un proceso exigente puede requerir control PID. En aplicaciones industriales, los modos de control permiten mantener variables como temperatura, presión, caudal, nivel, velocidad o concentración dentro de límites adecuados. Un control bien ajustado mejora la calidad del producto, reduce el consumo de energía, protege los equipos y aumenta la seguridad operativa. Definiciones importantes relacionadas :
|
| industrial fallout (Automotive) | Lluvia de polvo industrial. |
| Industrial Grade Relay (Heavy Equipment) | Relé de grado industrial |
| Industrial Grapple Bucket (Heavy Equipment) | Cucharón de garfio industrial |
| industrial hygiene (Heavy Equipment) | Higiene industrial |
| industrial hygiene hazards (Heavy Equipment) | Peligros de higiene industrial |
| industrial personnel accident ( electronics, computer science, nuclear energy ) | (accidente que afecta al personal industrial). Accidente que afecta al personal que trabaja en el reactor y que apenas difiere, en sus causas esenciales o en sus consecuencias, de los accidentes en otras industrias. |
| industrial screwdriver (Heavy Equipment) | Atornilladores industriales |
| industrial tube ( electronics, computer science, nuclear energy ) | (tubo para uso industrial). Tubo electrónico usado en aparatos de aplicación industrial. |
| industry classification (Heavy Equipment) | Clasificación de la industria |
| industry -proven reputation (Heavy Equipment) | Reputación comprobada en la industria |
| Industry Standard Architecture ( electronics, computer science, nuclear energy ) | (Arquitectura Estándar de la Industria). Diseño esencial para hacer que todas las partes de un ordenador personal trabajen juntas, usado en los viejos modelos de los PC de IBM, incluido el PC/AT y el PC/XT. |
| inelastic collision ( electronics, computer science, nuclear energy ) | (colisión inelástica). Colisión de partículas en la cual existe conservación del momento pero no de la energía cinética. |
| inelastic scattering ( electronics, computer science, nuclear energy ) | (dispersión inelástica). Dispersión causada por colisiones inelásticas. |
| inelastic scattering cross section ( electronics, computer science, nuclear energy ) | (sección eficaz de dispersión inelástica). (Véase CROSS SECTION, INELASTIC SCATTERING). ( electronics, computer science, nuclear energy ) |
| inert (Automotive) | Inerte. |
| inert gas (Refrigeration and air conditioning) | GAS INERTE: Gas que no cambia de estado ni químicamente, cuando está dentro de un sistema, aunque se exponga a otros gases. |
| inert shielding gas (Heavy Equipment) | Gas inerte de protección |
| inertia | Inercia. Propiedad por la cual todo cuerpo se opone a que se modifique su estado de reposo o de movimiento. |
| inertia ( electronics, computer science, nuclear energy ) | (inercia). Propiedad de todo cuerpo de oponerse a un cambio en su estado de reposo o movimiento. |
| inertia (Heavy Equipment) | Inercia |
| inertia -braked towable mass (Heavy Equipment) | Masa remolcable por inercia frenada |
| inertia force (Heavy Equipment) | Fuerza de inercia |
| inertia reel belt (Automotive) | Cinturón de seguridad con bloqueo por inercia. |
| inertia switch ( electronics, computer science, nuclear energy ) | (interruptor de inercia). Interruptor que se activa y desactiva por las fuerzas de inercia. |
| inertia switch (Automotive) | Interruptor por inercia. |
| inertia weld (Heavy Equipment) | Soldadura de inercia |
| inertial confinement fusion ( electronics, computer science, nuclear energy ) | (fusión por confinamiento inercial). Método de obtener la fusión nuclear en el que una diminuta esfera de combustible se comprime hasta alcanzar un estado muy denso y una temperatura muy elevada por medio de haces de fotones o de partículas de gran energía concentrados sobre ella. |
| inertial control ( electronics, computer science, nuclear energy ) | (control inercial, control de inercia). Sistema de control automático utilizado en los misiles dirigidos, basado en las fuerzas de inercia e independiente de la información obtenida exterior al misil. |
| inertial guidance | Guía inercial, guía por inercia. |
| INFCE ( electronics, computer science, nuclear energy ) | (INFCE). Siglas de «International Nuclear Fuel Cycle Evaluation», programa internacional de evaluación del ciclo del combustible nuclear desarrollado para decidir sobre la economía de los diversos ciclos y sus posibilidades de protección contra la desviación de materias fisionables para fines no pacíficos. |