El motor eléctrico es una máquina destinada a transformar energía eléctrica en energía mecánica.
Es el más usado de todos los tipos de motores, ya que combina las ventajas de la utilización de la energía eléctrica
—bajo costo, facilidad de transporte, limpieza y simplicidad de comando— con su construcción simple, costo reducido,
gran versatilidad de adaptación a las cargas más diversas y mejores rendimientos.
Los motores eléctricos convierten la energía eléctrica en energía mecánica y se encuentran en todas partes:
en las locomotoras del ferrocarril, el compresor del frigorífico o el mecanismo de arrastre del reproductor de vídeo.
Se pueden construir en todos los tamaños imaginables, y son mucho más adaptables, silenciosos y menos contaminantes
que los motores de vapor o de explosión (gasolina o diésel).
Los tipos de motores eléctricos más comunes son:
a) Motores de corriente continua
Son motores de costo más elevado y, además, precisan de una fuente de corriente continua o un dispositivo que convierta
la corriente alterna común en continua. Pueden funcionar con velocidad ajustable entre amplios límites y se prestan a
controles de gran flexibilidad y precisión. Por eso su uso es restringido a casos especiales en que estas exigencias
compensan el costo mucho más alto de la instalación.
b) Motores de corriente alterna
Son los más utilizados, porque la distribución de energía eléctrica se hace normalmente en corriente alterna.
Los principales tipos son:
– Motor sincrónico: Funciona con velocidad fija; utilizado solamente para grandes potencias
(debido a su alto costo en tamaños menores) o cuando se necesita velocidad invariable.
– Motor de inducción: Funciona normalmente con una velocidad constante, que varía ligeramente con la
carga mecánica aplicada al eje. Debido a su gran simplicidad, robustez y bajo costo, es el motor más utilizado, siendo
adecuado para casi todos los tipos de máquinas que se encuentran en la práctica.
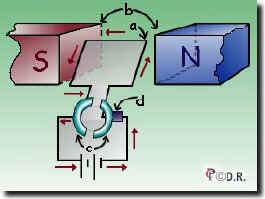
Comenzamos mirando el diseño global de un motor eléctrico DC simple de 2 polos. Un motor simple tiene 6 partes:
Un motor eléctrico está compuesto de imanes: estos los usan para crear movimiento. Si conoces un imán, conoces la ley
fundamental de todos los imanes: cargas opuestas se atraen e iguales se repelen. Así que si tiene dos imanes con sus
extremos como norte y sur, entonces el extremo norte se atraerá con el sur. De otro lado, el extremo norte del imán
repelerá el extremo norte del otro (y similarmente el sur repelerá el sur). Dentro de un motor eléctrico esas fuerzas
atractoras y repulsoras crean movimiento rotacional.
En el diagrama se pueden observar dos imanes en el motor: la armadura (o rotor) es un electroimán, mientras el imán
de campo es un imán permanente (el imán de campo puede ser un electroimán también, pero en los motores más pequeños
no ahorra energía).
IMANES Y MOTORES
Para entender cómo funciona un motor eléctrico, la clave es entender cómo funciona un electroimán.
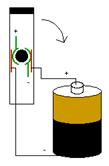
Un electroimán es la base de un motor eléctrico. Puede entender cómo funciona un motor si se imagina el siguiente
escenario. Digamos que usted creó un electroimán simple envolviendo 100 veces un alambre alrededor de un tornillo y
conectándolo a una batería. El tornillo se convertirá en un imán accionado por corriente eléctrica y tendrá un polo
norte y un polo sur mientras la batería esté conectada. Ahora digamos que usted toma el tornillo electroimán, coloca
un eje en la mitad, y lo suspende en la mitad de la herradura del electroimán como se muestra en la figura siguiente.
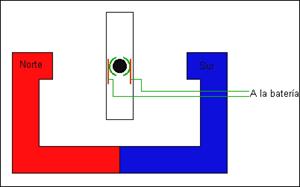
Si usted fuera a atar una batería al imán de tal forma que el extremo norte del tornillo que se muestra, la ley
básica del magnetismo le dirá qué pasará: el polo norte del electroimán será repelido del extremo norte de la herradura
del electroimán y atraído al extremo sur de la herradura del electroimán. El extremo sur del electroimán será repelido
de forma similar. El tornillo se movería una media vuelta y se colocaría en la posición mostrada.
Puede ver que este movimiento de media vuelta es simple y obvio porque naturalmente los imanes se atraen y repelen
uno al otro. La clave para un motor eléctrico es entonces ir al paso uno, así que, al momento en que ese movimiento
de media vuelta se complete, el campo del electroimán cambie. El cambio hace que el electroimán haga otra media vuelta.
Usted cambia el campo magnético simplemente cambiando la dirección del flujo de electrones en el alambre (se logra
esto moviendo la batería). Si el campo del electroimán cambia justo en el momento de cada media vuelta, el motor
eléctrico girará libremente.
La armadura toma el lugar del tornillo en un motor eléctrico. La armadura es un electroimán que se hace enrollando
alambre delgado alrededor de 2 o más polos de un centro de metal. La armadura tiene un eje, y el conmutador está
atado al eje. En el diagrama inmediato superior se pueden ver tres diferentes vistas de la misma armadura: frente,
lado y extremo. En la vista de extremo el enrollado de alambre es eliminado para hacer el conmutador más obvio.
Puede ver que el conmutador es un simple par de platos atados al eje. Esos platos dan las dos conexiones para el rollo
del electroimán.
La parte del “cambio del campo eléctrico” de un motor es complementada por dos cosas: el conmutador y los cepillos.
El diagrama inmediato superior muestra cómo el conmutador y los cepillos trabajan juntos para dejar que el flujo de
electrones vaya al electroimán, y también cambien la dirección de los electrones que corren en ese momento. Los
contactos del conmutador están atados al eje del electroimán, así que cambian con el imán. Los cepillos son sólo dos
pedazos de metal elástico o carbón que hacen contacto con el conmutador.
Cuando se juntan todas esas partes, lo que se obtiene es un motor eléctrico completo:
En esta figura, el bobinado de la armadura no se ha tenido en cuenta así que es fácil ver al conmutador en acción.
De lo que hay que darse cuenta es que la armadura pasa a través de la posición horizontal, los polos cambian en el
electroimán. Debido al cambio, el polo norte del electroimán está siempre sobre el eje para que pueda repeler el polo
norte del imán del campo y atraer el imán del campo del polo sur.
Si alguna vez tiene la oportunidad de desmontar un pequeño motor eléctrico encontrará que contiene las mismas partes
descritas arriba: dos pequeños imanes permanentes, un conmutador, dos cepillos y un electroimán hecho por un enrollado
de cable alrededor del metal. Casi siempre, el rotor tendrá tres polos en lugar de dos tal como se muestra en este
artículo. Hay dos buenas razones para que un motor tenga tres polos:
Esto hace que el motor sea más dinámico. En un motor de dos polos, si el electroimán está balanceado, perfectamente
horizontal entre los dos polos del imán del campo cuando el motor arranca, usted puede pensar que la armadura se
quede “pegada” ahí. Esto nunca ocurre en un motor de tres polos.
Cada vez que el conmutador toque el punto donde cambia el campo, en un motor de dos polos el conmutador enchufa la
batería (conecta directamente las terminales positivas y negativas) por un momento. Este enchufe hace que se gaste
la energía de la batería innecesariamente. Un motor de tres polos arregla el problema.
Es posible tener cualquier número de polos, dependiendo del tamaño del motor y la aplicación específica en que se esté
utilizando.
Fuerza contraelectromotriz (f.c.e.m.) en los motores de corriente continua
Vimos con cierto detalle los principios de los motores de corriente continua, pero no se tuvo en cuenta el efecto de
autoinducción que se produce en las bobinas que hay arrolladas en la armadura (por supuesto, la armadura de hierro
debe ser laminada, igual que el núcleo de los transformadores, para reducir las corrientes de Foucault). Cuanto más
rápidamente gira el motor, más grande es la f.e.m. inducida en las propias bobinas, y más se opone a la f.e.m. que
hace girar el motor (de ahí su denominación de fuerza contraelectromotriz). Por ejemplo, un motor diseñado para
funcionar con una alimentación de 50 V puede tener una f.c.e.m. de hasta 47 V cuando funciona a su velocidad nominal.
Con una resistencia de 1 Ω en la bobina, la corriente que se produce es de 3 A en el caso anterior, pues la tensión
resultante es de 3 V.
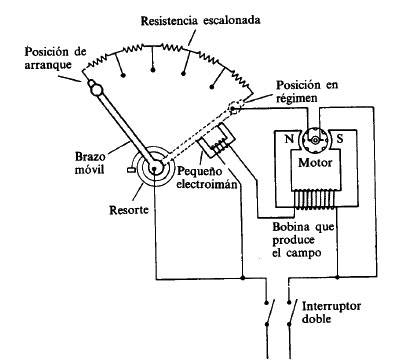
Sin embargo, cuando se conecta el motor, arranca partiendo de velocidad nula y no hay f.c.e.m., por lo cual las bobinas
soportan una tensión de 50 V, produciéndose una corriente de hasta 50 A. Lo que se necesita para resolver el problema
es una resistencia que varíe su valor en función de la velocidad que tenga el motor. En la figura siguiente se muestra
una forma para realizar esto.
Figura - Sistema de arranque de un motor de corriente continua por medio de una resistencia variable.
Obsérvese que se utiliza un electroimán para mover el brazo hasta la posición deseada y un muelle para que el brazo
vuelva a su posición inicial cuando se desconecta el motor. Este tipo de circuito de control electromecánico sirve
para ilustrar la idea de utilizar una resistencia que disminuya su valor progresivamente según va aumentando la
velocidad del motor. Este mismo efecto se puede conseguir utilizando sistemas de control electrónicos, que no tienen
partes móviles y que no requieren mantenimiento.
ARRANQUE DE MOTORES
Se denomina arranque de un motor al régimen transitorio en el que se eleva la velocidad del mismo desde el estado de
motor detenido hasta el de motor girando a la velocidad de régimen permanente.
El conjunto que se pone en marcha es inercial y disipativo, incluyendo en este último concepto a las cargas útiles,
pues consumen energía.
El estudio del arranque de los motores tiene una gran importancia práctica, ya que la elección correcta de las
características de los motores eléctricos y arrancadores a instalar está basada en el conocimiento de las particularidades
de este régimen transitorio.
Recordemos que el comportamiento dinámico del conjunto motor-máquina accionada está regido por la siguiente ecuación diferencial:
Donde Tm es el par motor, Tr el par resistente, J es el momento de inercia del
conjunto motor-máquina accionada y ω es la velocidad angular de dicho conjunto.
Por lo tanto, para que el conjunto comience a girar se necesita que el par motor supere al par resistente, de manera de
generar una aceleración angular de arranque. El proceso de arranque finaliza cuando se equilibra el par motor con el par
resistente, estabilizándose la velocidad de giro del motor.
Como la cupla motora es el producto de la corriente absorbida por el flujo del campo magnético, además de un factor que
caracteriza al tipo de máquina, este mayor par de arranque generalmente está asociado a una mayor corriente de arranque,
la que no debe superar determinado límite por el calentamiento de los conductores involucrados.
Aunque se suele enfocar el diseño de estos sistemas de arranque en atención a las corrientes y cuplas involucradas, no deben
dejarse de lado otros aspectos que también resultan importantes, como por ejemplo el consumo de energía disipada en forma
de calor y las perturbaciones sobre la red de baja tensión.
Estas perturbaciones incluyen principalmente las caídas de tensión (muy notables en los elementos de iluminación), que pueden
afectar el funcionamiento de otros elementos conectados a la misma, lo que resulta crítico en las instalaciones con muchos
motores que realizan frecuentes arranques.
Por otro lado, los dispositivos de arranque pueden ser de operación manual o por contactores. Estos últimos permiten efectuar
el mando a distancia del motor con cables de secciones pequeñas (sólo se requiere la corriente necesaria para la bobina del
contactor), lo que facilita el accionamiento y diseño del dispositivo de control por trabajar con intensidades reducidas.
De forma general los motores eléctricos se clasifican en:
Fig. Partes internas y representación de un motor de corriente continua con dos polos.
Fig. Motor de corriente continua de 2 polos y 4 bobinas en el rotor.
Fig. Principio de funcionamiento del motor de corriente continua.
Fig. Conexiones eléctricas del motor de corriente continua.
Problemas resueltos
1 - ¿Cuál es la frecuencia de un alternador de cuatro polos que opera a una velocidad de 1 500 rpm?
Para calcular la frecuencia (f) de un alternador:
f = (N · P) / 120
Donde:
f = frecuencia en Hz
N = velocidad en rpm
P = número de polos
Datos: N = 1 500 rpm, P = 4.
f = (1 500 · 4) / 120 = 6 000 / 120 = 50 Hz.
2 - ¿Qué valor tendrá la frecuencia de la f.e.m. generada en un alternador de 12 polos que gira a 600 r/m?
Se utiliza la misma fórmula:
f = (N · P) / 120
Datos: N = 600 rpm, P = 12.
f = (600 · 12) / 120 = 7 200 / 120 = 60 Hz.
3 - Un motor de 2 hp que funciona a la salida nominal de potencia actúa como impulsor principal de un alternador cuya demanda de carga es de 1,1 kW. ¿Cuál es la eficiencia del alternador, expresada porcentualmente? Despréciese la excitación del campo.
Potencia de entrada (motor): 2 hp = 2 · 0,746 kW = 1,492 kW.
Eficiencia = (Psalida / Pentrada) · 100
Eficiencia = (1,1 / 1,492) · 100 = 73,76 %.
4 - Un motor de jaula de ardilla de cuatro polos para 60 Hz tiene una velocidad a plena carga de 1 754 rpm. ¿Cuál es el porcentaje de deslizamiento a plena carga?
Ns = (120 · f) / P = (120 · 60) / 4 = 1 800 rpm
S = [(Ns - Nr) / Ns] · 100
S = [(1 800 - 1 754) / 1 800] · 100 ≈ 2,56 %
5 - El rotor de un generador de corriente alterna tiene un par de polos. Calcular la frecuencia de la f.e.m. inducida cuando el rotor gira a una velocidad de 50 r.p.s.
f = (n · p) / 2
Datos: n = 50 r.p.s, p = 2 polos.
f = (50 · 2) / 2 = 50 Hz.
Conceptos destacados :
electric motor (electrical engineering)
Motor eléctrico. Máquina que convierte energía eléctrica en energía mecánica mediante interacción electromagnética.
direct current (DC) (electrical engineering)
Corriente continua (CC). Corriente eléctrica que circula en un solo sentido, utilizada en motores y sistemas electrónicos.
alternating current (AC) (electrical engineering)
Corriente alterna (CA). Corriente eléctrica que cambia periódicamente de dirección y magnitud.
induction motor (electromechanics)
Motor de inducción. Motor de corriente alterna en el que la corriente del rotor se induce por el campo magnético del estator.
synchronous motor (electromechanics)
Motor síncrono. Motor que gira a velocidad constante sincronizada con la frecuencia de la red eléctrica.
armature (electrical machines)
Inducido. Parte del motor donde se induce la corriente y se genera el par electromagnético.
stator (electrical machines)
Estator. Parte fija del motor que produce el campo magnético.
rotor (electrical machines)
Rotor. Parte giratoria del motor que transforma la energía eléctrica en movimiento mecánico.
commutator (electromechanics)
Conmutador. Dispositivo mecánico que invierte la dirección de la corriente en el rotor de un motor de corriente continua.
brushes (electrical machines)
Escobillas. Elementos conductores que permiten el contacto eléctrico entre el circuito externo y el conmutador.
magnetic field (physics)
Campo magnético. Región del espacio donde actúan fuerzas magnéticas producidas por imanes o corrientes eléctricas.
electromagnet (electromagnetism)
Electroimán. Imán generado por el paso de corriente eléctrica a través de una bobina.
torque (mechanics)
Par motor. Momento de fuerza que produce la rotación de un eje o cuerpo.
rotational speed (mechanical engineering)
Velocidad de rotación. Velocidad angular de giro de un eje, generalmente expresada en rpm.
slip (electrical machines)
Deslizamiento. Diferencia relativa entre la velocidad síncrona y la velocidad real del rotor.
starting current (power engineering)
Corriente de arranque. Corriente elevada que absorbe un motor al momento de arrancar.
back electromotive force (back EMF) (electrical engineering)
Fuerza contraelectromotriz (FCEM). Tensión inducida en un motor que se opone a la tensión aplicada.
power factor (electrical engineering)
Factor de potencia. Relación entre la potencia activa y la potencia aparente en un sistema eléctrico.
efficiency (energy systems)
Rendimiento. Relación entre la potencia útil obtenida y la potencia total suministrada.
mechanical load (mechanics)
Carga mecánica. Resistencia mecánica aplicada al eje de un motor durante su funcionamiento.
starting torque (electromechanics)
Par de arranque. Par desarrollado por un motor en el instante del arranque.
electrical losses (electrical engineering)
Pérdidas eléctricas. Pérdidas de energía en forma de calor debidas a resistencia y efectos magnéticos.
core losses (electrical machines)
Pérdidas en el núcleo. Pérdidas debidas a histéresis y corrientes parásitas.
cooling system (thermal engineering)
Sistema de refrigeración. Sistema destinado a disipar el calor generado en un motor eléctrico.
stator winding (electrical machines)
Bobinado del estator. Conjunto de bobinas ubicadas en el estator que generan el campo magnético.
rotor winding (electrical machines)
Bobinado del rotor. Bobinado ubicado en el rotor que interactúa con el campo magnético.
starting resistor (electrical engineering)
Resistencia de arranque. Resistencia utilizada para limitar la corriente durante el arranque del motor.
control circuit (automation)
Circuito de control. Conjunto de dispositivos que gobiernan el funcionamiento de un motor eléctrico.
electromechanical energy conversion (energy systems)
Conversión electromecánica de energía. Proceso mediante el cual la energía eléctrica se transforma en energía mecánica.