(filtro activo). Filtro que emplea dispositivos activos, típicamente amplificadores operacionales. Filtro que contiene elementos activos, tales como transistores, amplificadores operacionales, etc., junto con elementos pasivos.
Filtros activos vs. filtros pasivos
Los filtros activos (active filters) son aquellos que incluyen un amplificador dentro de su diseño, mientras que los filtros pasivos (passive filters) utilizan únicamente resistencias, capacitores e inductores.
Ventajas de los filtros activos
- Permiten obtener ganancia mayor que uno (gain > 1).
- Facilitan la descomposición en etapas independientes.
- Presentan baja impedancia de salida (Zout ≈ 0).
- Permiten la conexión en cascada de múltiples etapas sin interacción significativa.
- Pueden suministrar corriente apreciable en la salida.
- Simplifican el diseño de frecuencias de corte en filtros pasa-banda.
Ventajas de los filtros pasivos
- Menor costo y menor cantidad de componentes.
- No presentan limitaciones de ancho de banda asociadas a amplificadores.
- No requieren alimentación externa.
Orden del filtro y pendiente
Al conectar varias etapas en cascada, se incrementa el orden del filtro, lo que produce una transición más abrupta entre la banda pasante y la banda de rechazo. La ganancia se comporta según:
G ∝ fn o G ∝ f−n
donde n es el orden del filtro. En una escala logarítmica (log-log plot), esto se traduce en pendientes proporcionales a ±n.
La pendiente o atenuación (roll-off) se expresa en:
dB/octave o dB/decade
Por ejemplo, un filtro RC de primer orden presenta una pendiente típica de:
6 dB/octave ≈ 20 dB/decade
Características prácticas
Los diseños de filtros activos utilizados suelen ser simples y fáciles de analizar, como los filtros pasa-altos y pasa-bajos de primer orden, y combinaciones de ambos para obtener filtros pasa-banda. Existen diseños más avanzados capaces de lograr pendientes más pronunciadas, como 40 dB/decade por etapa, o anchos de banda más estrechos.
Una característica importante es que los filtros activos presentan baja impedancia de salida, lo que facilita su conexión con etapas posteriores. Sin embargo, su impedancia de entrada no es muy alta, lo que puede afectar el comportamiento de etapas anteriores.
Por esta razón, no es recomendable utilizar un filtro activo directamente después de un sensor con alta impedancia, ni colocarlo inmediatamente después de un filtro pasivo, ya que puede modificar su respuesta.
En síntesis, los filtros activos ofrecen mayor flexibilidad y control en el diseño de sistemas de procesamiento de señales, mientras que los filtros pasivos destacan por su simplicidad y bajo costo.
Filtro activo pasa-bajos
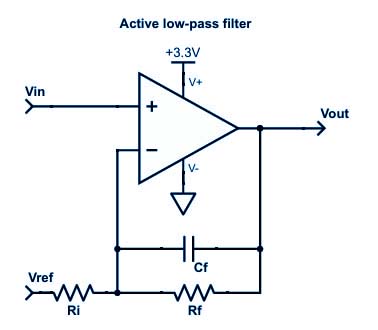
Figura : filtro pasa-bajos activo
Un filtro pasa-bajos activo (active low-pass filter) puede implementarse a partir de un amplificador con realimentación negativa, incorporando una red formada por una resistencia y un capacitor en la realimentación. A bajas frecuencias, la impedancia del capacitor es alta, por lo que el circuito se comporta como un amplificador convencional. A altas frecuencias, la impedancia del capacitor disminuye, reduciendo la ganancia del sistema.
Comportamiento en frecuencia
A bajas frecuencias:
Z ≈ Rf
A altas frecuencias:
Z ≈ 1 / (jωCf)
Esto provoca que la ganancia disminuya al aumentar la frecuencia.
Ganancia del filtro
Para la configuración inversora, la ganancia es:
G = −Rf/Ri · 1 / (jωRfCf + 1)
En la banda pasante, esta expresión se simplifica a:
G ≈ −Rf/Ri
Frecuencia de corte
La frecuencia de corte (corner frequency) está dada por:
fc = 1 / (2πRfCf)
y la impedancia de entrada es aproximadamente:
Zin = Ri
Consideraciones de diseño
Una desventaja de la configuración inversora es que la impedancia de entrada es relativamente baja, lo que exige que la fuente de señal tenga baja impedancia. Si la señal proviene de un sensor de alta impedancia, puede ser preferible utilizar una configuración no inversora.
Una ventaja importante de los filtros activos es que pueden conectarse en cascada sin interacción significativa entre etapas. Esto permite aumentar el orden del filtro y mejorar la pendiente de atenuación.
Filtro en cascada
Para un filtro pasa-bajos, la función de transferencia es:
G(f) = Gp / (1 + j f / fc)
El módulo de la ganancia es:
|G(f)| = Gp / √(1 + (f/fc)²)
Para n etapas en cascada:
|G(f)|ⁿ = (Gp)ⁿ (1 + (f/fc)²)−n/2
Frecuencia de corte equivalente
Cuando se conectan múltiples filtros idénticos, la nueva frecuencia de corte se desplaza y queda definida por:
f = fc √(21/n − 1)
Esto indica que la frecuencia de corte efectiva disminuye a medida que aumenta el número de etapas, haciendo el filtro más selectivo.
Conclusión
Los filtros activos pasa-bajos permiten controlar la respuesta en frecuencia mediante el uso de amplificadores y redes RC, ofreciendo flexibilidad en el diseño, posibilidad de ganancia y facilidad de implementación en sistemas de procesamiento de señales.
Filtro activo pasa-altos
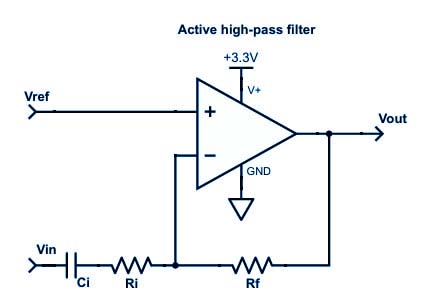
Figura : filtro pasa-altos activo genérico
Un filtro pasa-altos activo (active high-pass filter) puede implementarse utilizando un amplificador inversor con una red RC en la entrada. Su funcionamiento es similar al del filtro pasa-bajos, pero permite el paso de señales de alta frecuencia y atenúa las bajas frecuencias.
Ganancia del filtro
La ganancia está dada por:
G = −Zf / Zi
Reemplazando impedancias:
G = −Rf / (Ri + 1/(jωCi))
o bien:
G = −jωRfCi / (1 + jωRiCi)
Comportamiento en frecuencia
Cuando ω → 0, la ganancia tiende a cero, bloqueando señales de baja frecuencia. Cuando ω → ∞, la ganancia se aproxima a:
G ≈ −Rf / Ri
Frecuencia de corte
La frecuencia de corte está determinada por:
fc = 1 / (2πRiCi)
Impedancia de entrada
La impedancia de entrada es:
Zin = Ri + 1 / (j2πfCi)
Este tipo de filtro es ampliamente utilizado para eliminar componentes de baja frecuencia, como ruido o señales de continua, permitiendo el paso de señales de mayor frecuencia en sistemas electrónicos. |


