| servomotor |
Servomotor: Definición, Partes, Aplicaciones y Tipos
Un servomotor es un tipo especial de motor eléctrico que es capaz de controlar la posición, velocidad y aceleración de un mecanismo de manera precisa. Se utiliza en una amplia gama de aplicaciones industriales y tecnológicas donde se requiere un control de movimiento exacto, tales como sistemas de automatización, robótica y máquinas herramienta.
En los sistemas modernos de control de movimiento, se han adaptado diversos tipos de motores eléctricos por sus características de respuesta lineal. Estos incluyen tanto motores rotativos como lineales, de corriente alterna (AC) y corriente continua (DC). Estos motores se pueden clasificar en dos categorías principales: los que requieren la operación en sistemas servocontrolados de lazo cerrado (closed-loop) y los que pueden funcionar en lazo abierto (open-loop).

Definición y Funcionamiento del Servomotor
El servomotor se distingue de otros tipos de motores eléctricos por su capacidad para recibir señales de control y producir un movimiento de salida controlado y preciso. Este tipo de motor está diseñado para operar dentro de un sistema de retroalimentación, que permite al servomotor ajustar su salida según las señales de entrada recibidas. En otras palabras, el servomotor no solo genera rotación, sino que también puede mantener un ángulo o velocidad específicos de manera constante y eficiente.



El principio de funcionamiento de un servomotor se basa en un sistema de control de retroalimentación, generalmente utilizando un potenciómetro o un codificador para medir la posición o velocidad del motor, y un controlador que ajusta la corriente o el voltaje suministrado al motor para mantener los valores deseados. Este sistema garantiza que el servomotor siempre esté en la posición correcta o funcionando a la velocidad correcta.


Partes Principales de un Servomotor

Fig. 1 Vista en corte de un servomotor de corriente continua con imán permanente de fracción de potencia.

Fig. 2 Vista explosiva de un servomotor de corriente continua con imán permanente y un armadura tipo disco.

Fig. 3 Vista en corte de un servomotor de corriente continua con imán permanente y un armadura tipo copa.

Fig. 4 Vista explosiva de un servomotor de corriente continua de tipo con escobillas y fracción de potencia.

Fig. 5 Vista en corte de un motor de corriente continua sin escobillas.

Fig. 6 Diagrama simplificado de la conmutación del dispositivo de efecto Hall (HED) en un motor de corriente continua sin escobillas.

Fig. 7 Vista explosiva de un motor de corriente continua sin escobillas con conmutación mediante dispositivo de efecto Hall (HED).
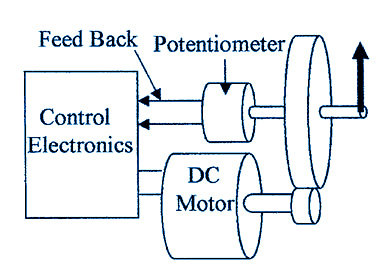
- Retroalimentación ( Feed Back )
- Potenciómetro ( Potentiometer )
- Electrónica de control ( Control Electronics )
- Motor de corriente continua ( DC Motor )
- Eje de salida ( Output Shaft )
- Lazo de retroalimentación ( Feedback Loop )
- Señal de control ( Control Signal )
- Movimiento angular ( Angular Motion )
Figura : Servomotor con lazo de retroalimentación.
El servomotor consta de varios componentes que trabajan en conjunto para lograr su función de control preciso. Las partes principales incluyen:
-
Motor Eléctrico: La parte principal del servomotor es el motor eléctrico, que puede ser de corriente continua (DC) o de corriente alterna (AC). En motores de corriente continua, el control de la velocidad y la dirección se realiza a través de la variación de voltaje, mientras que los motores de corriente alterna suelen ser más utilizados en aplicaciones de mayor potencia.
-
Caja de Reducción o Reductor de Velocidad: La mayoría de los servomotores contienen una caja de reducción que reduce la velocidad del motor y aumenta el par de salida. Esto es importante para aplicaciones que requieren movimientos de alta precisión a velocidades más lentas.
-
Codificador o Potenciómetro: Estos sensores permiten al sistema de control del servomotor conocer la posición exacta del eje. Los codificadores convierten el movimiento rotacional en señales digitales que se envían al controlador para ajustar el motor.
-
Controlador: El controlador es una unidad electrónica que recibe las señales de entrada (tales como la posición deseada, la velocidad o el par), procesa la información y luego ajusta la energía suministrada al motor para alcanzar los objetivos establecidos.
-
Fuente de Alimentación: Para funcionar, el servomotor necesita una fuente de energía, que generalmente es una fuente de corriente continua o alterna, dependiendo del tipo de motor utilizado.
Tipos de Servomotores
Existen varios tipos de servomotores, cada uno adecuado para diferentes aplicaciones y requisitos de rendimiento. Los tipos principales incluyen:
-
Servomotores de Corriente Continua (DC): Este es el tipo más común de servomotor debido a su simple control y operación. Los servomotores DC utilizan un motor de corriente continua junto con un sistema de retroalimentación para controlar la velocidad y la posición del motor. Son especialmente útiles en aplicaciones donde se necesita un alto torque en un rango limitado de velocidades.
- Ventajas: Simplicidad en el control, bajo costo y buena respuesta dinámica.
- Desventajas: Limitación en el control de velocidad a medida que aumenta la carga.
-
Servomotores de Corriente Alterna (AC): Estos motores son utilizados en aplicaciones industriales donde se requiere mayor potencia. Los servomotores AC suelen ser más robustos y pueden funcionar a velocidades más altas que los motores DC. Dentro de este tipo, se encuentran dos subcategorías:
-
Servomotores de Síncronos: La velocidad de estos servomotores está directamente relacionada con la frecuencia de la corriente alterna suministrada, lo que les permite mantener una velocidad constante independientemente de las variaciones en la carga.
-
Servomotores Asíncronos (o de inducción): Son más utilizados en aplicaciones industriales que requieren un motor robusto, sin la necesidad de un control tan preciso de la velocidad.
-
Ventajas: Alta eficiencia, mejor rendimiento a altas velocidades, mayor durabilidad.
-
Desventajas: Mayor costo y complejidad en el control.
-
Servomotores Sin Escobillas (Brushless): Los servomotores sin escobillas utilizan un diseño más avanzado que elimina las escobillas de los servomotores tradicionales. Este diseño mejora la eficiencia, reduce el mantenimiento y aumenta la vida útil del motor.
- Ventajas: Menos mantenimiento, mayor eficiencia, y vida útil más larga.
- Desventajas: Costo más alto y mayor complejidad en el control.
-
Servomotores de Torque Directo: Este tipo de servomotor se utiliza en aplicaciones que requieren un control de alta precisión sin la necesidad de reducción de velocidad adicional. Estos servomotores permiten un control preciso del par en un rango amplio de velocidades.
- Ventajas: No requieren caja de reducción, alta precisión y control de par directo.
- Desventajas: Costos elevados y mayor tamaño.
Aplicaciones de los Servomotores
Los servomotores se emplean en una variedad de aplicaciones industriales, comerciales y de consumo. Algunos de los sectores clave incluyen:
-
Automatización y Robótica: Los servomotores son fundamentales en los sistemas de robótica industrial, donde se requiere un control preciso de la posición y la velocidad de los actuadores robóticos. Estos motores permiten a los robots realizar movimientos complejos, como ensamblaje, soldadura y manipulación de piezas.
-
Sistemas de Control de Movimiento: En máquinas CNC (Control Numérico Computarizado), los servomotores son utilizados para controlar el movimiento de las herramientas de corte y otras partes móviles de la máquina. Esto asegura que las piezas sean fabricadas con alta precisión.
-
Electrodomésticos Inteligentes: En dispositivos como impresoras 3D, cámaras de seguridad con control de movimiento y sistemas de ventilación, los servomotores proporcionan el movimiento preciso necesario para su funcionamiento.
-
Industria Automotriz: Los servomotores son utilizados en sistemas como los asientos eléctricos, las ventanas eléctricas, los sistemas de dirección asistida y las suspensiones activas, donde se requiere un control de movimiento preciso y eficiente.
-
Dispositivos de Energía Renovable: En sistemas de seguimiento solar y aerogeneradores, los servomotores son empleados para ajustar la posición de los paneles solares o las palas de los generadores, asegurando su orientación óptima para maximizar la eficiencia de la generación de energía.
Ventajas y Desventajas de los Servomotores
Ventajas:
- Alta precisión y control de movimiento.
- Respuesta rápida y dinámica.
- Eficiencia energética, especialmente en servomotores sin escobillas.
- Bajo mantenimiento, particularmente en motores sin escobillas.
Desventajas:
- Costo relativamente alto, especialmente en servomotores sin escobillas y de alto rendimiento.
- Requiere controladores especializados, lo que aumenta la complejidad del sistema.
- Sensibilidad a las condiciones ambientales, como la temperatura y la humedad.
Términos destacados:
- Aceleración (Acceleration)
- Ángulo de desalineación (Misalignment angle)
- Amortiguación (Damping)
- Arranque suave (Soft start)
- Atributos de control (Control attributes)
- Backlash (Backlash)
- Caja de reducción (Gearbox)
- Capacidad de torque (Torque capacity)
- Control de velocidad (Speed control)
- Control de posición (Position control)
- Controlador (Controller)
- Corriente continua (Direct current - DC)
- Corriente alterna (Alternating current - AC)
- Desempeño (Performance)
- Desviación de velocidad (Speed deviation)
- Eficiencia (Efficiency)
- Electromagnetismo (Electromagnetism)
- Escobillas (Brushes)
- Frecuencia (Frequency)
- Fuerza de torque (Torque force)
- Generador de corriente continua (DC generator)
- Habilidad de respuesta (Response capability)
- Motor sin escobillas (Brushless motor)
- Motor paso a paso (Step motor)
- Motor síncrono (Synchronous motor)
- Motor de inducción (Induction motor)
- Motor de corriente continua (DC motor)
- Motor de corriente alterna (AC motor)
- Par motor (Motor torque)
- Potenciómetro (Potentiometer)
- Presión (Pressure)
- Regulación de voltaje (Voltage regulation)
- Revoluciones por minuto (Revolutions per minute - RPM)
- Sistemas de retroalimentación (Feedback systems)
- Sistemas de control automático (Automatic control systems)
- Sistemas de precisión (Precision systems)
- Sistemas de accionamiento (Drive systems)
- Torque de salida (Output torque)
- Transductor (Transducer)
- Velocidad constante (Constant speed)
Los servomotores son una parte integral de los sistemas de control de movimiento en la actualidad. Su capacidad para proporcionar un control preciso de la posición, velocidad y aceleración los hace ideales para aplicaciones que requieren un alto rendimiento y precisión. Con su amplia variedad de tipos y aplicaciones, los servomotores seguirán siendo fundamentales en una gama de industrias y productos, ayudando a impulsar avances en robótica, manufactura, automatización y más.
Aplicaciones Relevantes
- Robótica: Motores cup y disco por su bajo perfil y alta respuesta.
- CNC y maquinaria de precisión: Motores brushless por su fiabilidad y control fino.
- Instrumentación médica: Motores miniatura brushless con sensores Hall internos.
- Automatización industrial: Stepper motors en líneas de producción donde el posicionamiento aproximado es suficiente.
|


