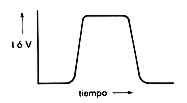
| Pulse width modulation (PWM), modulación de impulsos en anchura, modulación por ancho de pulso. (Electrónica - Electronics ), See: pulse amplitude modulation ( modulación de impulsos en duración). Pulse width modulation (PWM) refers to the amount of time that power is turned on to a circuit during a given period of time. Pulse width modulation is used to accurately adjust the speed and/or travel of electric motors and devices. PWM can also be used to dim lights. Pulse width functions like this: If a transistor is turned on for 80% of a second, and off for the other 20% of a second, this would be a duty cycle of 80% for the given timeframe. If you apply this 80% pulse width to a motor, it will spin at 80% of its maximum speed. If you apply an 80% pulse width to a lamp, it will operate at 80% of its total brightness. If you apply 80% of pulse width to an actuator, it will only move 80% of its total distance. The principle of pulse width modulation is widely used by control modules to vary the speed, intensity, and travel of the electrical devices controlled.
La modulación de ancho de pulso (PWM) se refiere a la cantidad de tiempo que se enciende un circuito durante un período de tiempo determinado. La modulación de ancho de pulso se utiliza para ajustar con precisión la velocidad y/o el recorrido de motores y dispositivos eléctricos. PWM también se puede utilizar para atenuar las luces. El ancho de pulso funciona así: si un transistor se enciende durante el 80% de un segundo y se apaga durante el otro 20% de un segundo, este sería un ciclo de trabajo del 80% para el período de tiempo dado. Si aplica este ancho de pulso del 80% a un motor, girará al 80% de su velocidad máxima. Si aplica un ancho de pulso del 80 % a una lámpara, funcionará al 80 % de su brillo total. Si aplica el 80 % del ancho de pulso a un actuador, solo se moverá el 80 % de su distancia total. El principio de la modulación por ancho de pulso es ampliamente utilizado por los módulos de control para variar la velocidad, la intensidad y el recorrido de los dispositivos eléctricos controlados.
Control de motores de corriente continua con escobillas (brushed DC motors) mediante modulación por ancho de pulsos (PWM - pulse-width modulation):
Los diseñadores deben determinar la mejor frecuencia para obtener la menor ondulación (least ripple) y la mayor vida útil de un motor (longest life out of a motor).
Muchas aplicaciones que utilizan motores en miniatura de CC con escobillas requieren que los motores funcionen en más de un punto de carga (load point) o mediante ciclos de carga específicos (load cycles). Hacer funcionar un motor en puntos de carga específicos requiere una fuente de energía (power source) variable y controlable. Esto se puede hacer mediante una fuente de alimentación de regulación lineal continua (continuous linear regulation power supply) o modulación por ancho de pulso (PWM).
La regulación lineal (linear regulation) es generalmente ineficiente y requiere una carcasa más grande. Además, en aplicaciones impulsadas por batería (battery-driven), no es práctico utilizar la regulación lineal en diferentes puntos de carga. La regulación de voltaje (PWM), por otro lado, es eficiente y se puede usar de manera efectiva con aplicaciones de batería (battery) o alimentadas por CC (DC power-driven applications). La mejor eficiencia del variador de ancho de pulsos aumenta la vida útil de la batería y reduce el calentamiento (heating) de los componentes electrónicos (electronic components).
Una compensación (trade-off) del uso de PWM con un motor son las pérdidas por corrientes parásitas (eddy current losses) en los devanados del rotor (rotor windings) debido a la conmutación continua por ancho de pulsos que, en general, no están presentes en las fuentes de energía lineales. Sin embargo, un regulador por ancho de pulsos correctamente diseñado minimiza los efectos de las corrientes parásitas y mejora la forma en que se accionan los motores.
Los motores de CC con escobillas sin núcleo (coreless brushed DC motors) tienen baja inercia (low inertia) e inductancia (inductance). Esto les permite usarse en aplicaciones que necesitan un comportamiento dinámico y respuestas rápidas del motor. El uso del control de velocidad por ancho de pulsos permite un control de corriente preciso en los devanados. Por tanto, el par de salida (output torque), que es linealmente proporcional a la corriente media del devanado (average winding current), se puede controlar correctamente en motores sin núcleo.
A diferencia de las cargas resistivas puras (pure resistive loads) para motores de CC (DC motors) , la resistencia, la inductancia y la fuerza contraelectromotriz inversa (counter-electromotive force , counter EMF, CEMF, back electromotive force, back EMF) en los devanados del rotor son factores decisivos para optimizar (frequency) la frecuencia y el ciclo de trabajo (duty cycle) de PWM.
Fuente de alimentación lineal (linear source) versus fuente conmutada
Con una fuente de CC lineal (linear DC source) (como en la figura siguiente), la corriente es una función solo de la resistencia del devanado (winding resistance). La inductancia no afecta la corriente como en una fuente constante. La impedancia de un inductor (inductor’s impedance) es cero.

Fig. : Un diagrama de circuito de un motor impulsor que utiliza una fuente de CC variable.
Los valores de catálogo y la predicción de la vida útil (life prediction) para la mayoría de los motores sin núcleo se estiman utilizando una fuente de alimentación de CC lineal y constante.
Cuando se usa una fuente conmutada, el circuito ve resistencia óhmica (Ohmic resistance) e inductancia debido a la conmutación frecuente. Además, se genera una fuerza contraelectromotriz posterior equivalente a las características del motor (KE) y la velocidad (speed) a través del terminal. Esto complica el circuito de la fuente conmutada al diseñarlo para una aplicación específica, ya que deben controlarse con precisión no solo el ciclo de trabajo (duty cycle) sino también la frecuencia del pulso de la fuente conmutada (frequency of PWM) para obtener el mejor rendimiento del motor.
Cuando el motor está en reposo (at rest) o girando a baja velocidad (rotating at a low speed), la fuerza contraelectrpomotriz puede despreciarse. El circuito equivalente simplificado (simplified equivalent circuit) del motor se muestra a continuación.

Fig. : Cuando el motor está en reposo o se mueve lentamente, puede ser representado por un inductor y una resistencia.
El diodo amortiguador (free wheel or snubber diode) (paralelo a los terminales del motor en el esquema anterior) nunca deben omitirse cuando se usa un voltaje variable como con modulación de ancho de pulso. El diodo permite que la carga se disipe sin formar un arco (arcing) al conmutar (switching).
Cuando el motor funciona a una velocidad moderadamente alta, la fuerza contraelectromotriz es comparable al voltaje aplicado, por lo que un componente representándola debe agregarse al circuito equivalente. El circuito equivalente modificado se muestra a continuación.
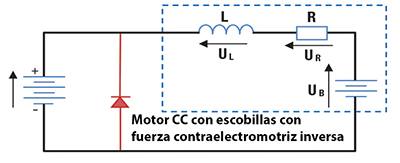
Fig. : Circuito equivalente básico para motor de corriente continua con escobillas. Cuando el motor está funcionando a velocidad moderada, se puede representar mediante un inductor, una resistencia y una fuente de alimentación.
La fuerza contraelectromotriz (back EMF), junto con el circuito RL en un motor de CC con escobillas, aporta no linealidad (non-linearity) al control y la frecuencia de ancho de pulso y el ciclo de trabajo de la fuente conmutada se vuelven importantes para obtener la mejor potencia de salida.
Cuando un control de modulación de ancho de pulso impulsa un motor (PWM drives the motor) y la compatibilidad electromagnética (electromagnetic compatibility) es crítica, se recomienda analizar los efectos de la radiación porque la energía electromagnética radiada es generalmente mayor con fuentes conmutadas que con fuentes lineales de CC. |